Arduino: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 17: | Zeile 17: | ||
*ATMega besser mit Quartz laufen lassen, ansonsten funktioniert möglicherweise die Kommunikation via SPI nicht | *ATMega besser mit Quartz laufen lassen, ansonsten funktioniert möglicherweise die Kommunikation via SPI nicht | ||
*Achtung, Taktgeber nicht auf "external Clock" einstellen, dann muss der Takt von außen aktiv vorgegeben werden. Hilfe gibt es [http://www.nibo-roboter.de/wiki/Ausgesperrt hier] | *Achtung, Taktgeber nicht auf "external Clock" einstellen, dann muss der Takt von außen aktiv vorgegeben werden. Hilfe gibt es [http://www.nibo-roboter.de/wiki/Ausgesperrt hier] | ||
===Lesen/Schreiben von Fuses für ATMega168=== | |||
Read fuses: | |||
<code>avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf</code> | |||
Write default fuses: | |||
<code>avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf -U lfuse:w:0x62:m -U hfuse:w:0xdf:m -U efuse:w:0xf9:m</code> | |||
Write fuses for external oszillator: | |||
<code>avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf -U lfuse:w:0xE2:m -U hfuse:w:0xdf:m -U efuse:w:0xf9:m</code> | |||
==Quadrokopter== | ==Quadrokopter== | ||
Siehe [[Quadrokopter]] | Siehe [[Quadrokopter]] | ||
Version vom 15. November 2015, 17:53 Uhr
Arduino als In-System-Programmierer
Links
- Arduino als In-System-Programmierer
- Firmware flashen
- Arduino Micro as ISP
- From Arduino to a Microcontroller on a Breadboard
- Tipps zu AVR Fuses
- Einstellhilfe für AVR Fuses
- Microcontroller.net: AVR
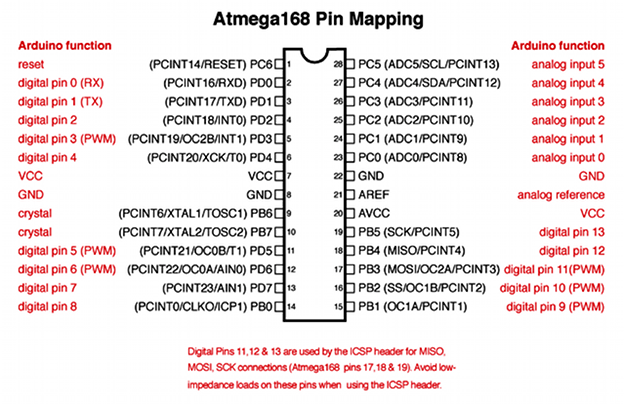
- ATMega168 Pin-Layout
- Arduino Micro Pin-Layout
- ATMega168 Pin-Layout
- ISP-Programmer für Arduino nach stk500v2-Protokoll
{kind=link}
Beschreibung
- ATMega besser mit Quartz laufen lassen, ansonsten funktioniert möglicherweise die Kommunikation via SPI nicht
- Achtung, Taktgeber nicht auf "external Clock" einstellen, dann muss der Takt von außen aktiv vorgegeben werden. Hilfe gibt es hier
Lesen/Schreiben von Fuses für ATMega168
Read fuses:
avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf
Write default fuses:
avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf -U lfuse:w:0x62:m -U hfuse:w:0xdf:m -U efuse:w:0xf9:m
Write fuses for external oszillator:
avrdude.exe -P COM6 -b 19200 -c arduino -p atmega168p -C ..\etc\avrdude.conf -U lfuse:w:0xE2:m -U hfuse:w:0xdf:m -U efuse:w:0xf9:m
Quadrokopter
Siehe Quadrokopter